¶ 1. SPI通讯模式
¶ 1.1 硬件连接
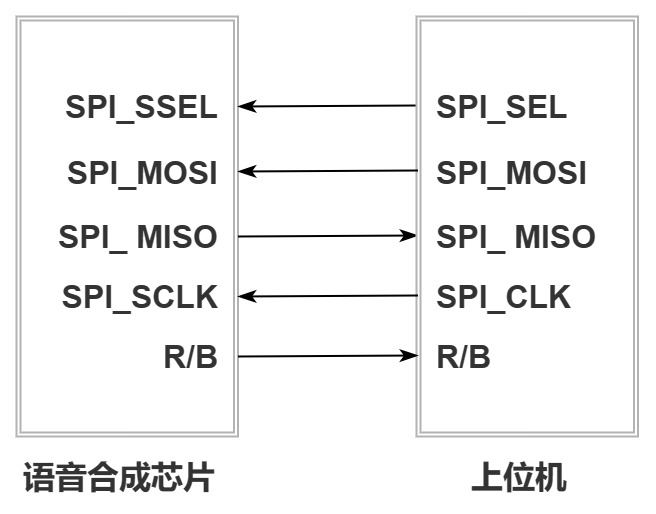
本语音合成芯片的SPI接口是4线全双工同步串行通讯接口,上位机作为SPI通讯中的Master 身份,本语音合成芯片在SPI通讯中设为Slave身份,SPI 通讯所需的时钟信号由上位机提供。
¶ 1.2 通讯传输字节格式
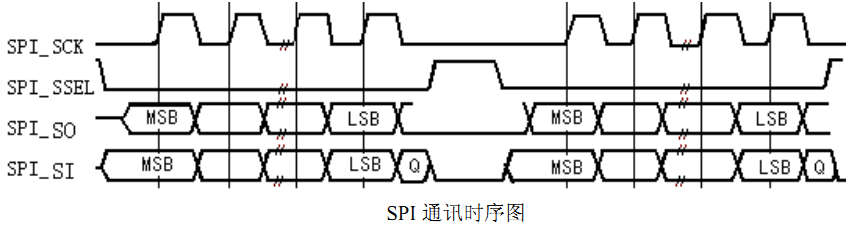
SPI通讯属于同步串行通讯,上位机在和本芯片的通讯中,由上位机提供同步时钟信号,在同步时钟的上升沿本芯片锁存1bit数据,每传输 8bits 数据完成一个字节数据的传输。
¶ 1.3 通讯要求
在发送一个字节之前,将SPI_SSEL 置为低电平,发送一个字节后将SPI_SSEL 置为高电平。
每两个字节之间必须插入一段等待,时间不少于50us。
同一帧数据2个字节之间的延时不能超过20ms,超过认为是下一帧数据的开始。
建议用户发完一个命令帧之后延时200ms以上再发下一个命令帧。
硬件电路必须将芯片波特率配置端口的两个管脚BAUD0、BAUD1,配置成低电平;(此配置与SPI实际通讯速率无关);
上位机所采用的CLK频率不能超过22000Hz。
¶ 1.4 芯片回传
本芯片收到命令帧后会判断此命令帧正确与否。如果命令帧正确,则返回“接收成功”回传;如果命令帧错误,则返回“接收失败” 回传。
| 回传类型名称 | 回传数据 | 触发条件 |
|---|---|---|
| 初始化成功回传 | 无 | SPI通讯不支持 |
| 收到正确的命令帧回传 | 0x41 | 接收成功,收到正确的命令帧 |
| 收到不能识别命令帧回传 | 0x45 | 接收失败,收到错误的命令帧 |
| 芯片播音状态回传 | 无 | SPI通讯不支持“状态查询命令” |
| 芯片空闲状态回传 | 无 | SPI通讯不支持“状态查询命令” |
¶ 1.5 命令支持
不支持:软件查询命令(若正在播音,强行使用会停掉播音),请使用硬件查询芯片状态(高电平:播音状态;低电平:空闲状态);
不支持: 0x31文本缓存存储命令 和 0x32文本缓存播放命令,这两个命令为特殊应用;
在播音发声状态下,直接发送恢复命令或唤醒命令,会停止播音;
¶ 1.6 芯片各状态下的功耗参数
| 合成文本状态 | 空闲 | Standby |
|---|---|---|
| 53mA | 27mA | 400μA |
¶ 2. SPI通讯如何发送命令帧
为确保SPI通讯的稳定性,用户在发送命令帧时必须调用本手册提供的封装函数
《SYN6658SpiSendFrame》,请用户将本封装函数《SYN6658SpiSendFrame》嵌入自己的程序中去。
本封装函数《SYN6658SpiSendFrame》中调用的数据类型和3个子函数,客户根据自己的硬件情况自己配置和实现。
本手册给出的用户发送命令帧的调用举例。
¶ 2.1 发送命令帧的封装函数
/******************************************************************
* 功能 : 发送1个命令帧数据
* 参数1 : 命令帧的地址
* 参数2 : 命令帧的总长度(按字节计数)
* 返回值: 0x41:表示下位机接收成功
* 0x45:表示失败(通讯异常或准备命令帧有错)
******************************************************************/
T_UInt8 SYN6658SpiSendFrame(T_UInt8 *buffOfFrame, T_UInt16 nFrameLen)
{
T_UInt8 nReceiveData;
T_UInt8 nCircleTimes;
T_UInt16 i;
T_UInt8 nBuffStopAddEnd[5]={0xFD,0x00,0x01,0x02,0xFF};
//循环确保SYN6658芯片为Ready状态(即R/B引脚为低电平)
nCircleTimes = 0;
while( SYN6658SpiCheckBusy() == 1 )
{
SYN6658SpiSendOneByte(0xA5); //发送暂停同步字节0xA5,
SYN6658SpiDelayMs(5);
nCircleTimes++;
if( nCircleTimes > 10 ) // 1次成功率在98%以上,多次确保成功
return 0x45; //失败:通讯异常
}
//若为:合成命令或Standby命令
if((*(buffOfFrame+3)==0x01 )||(*(buffOfFrame+3)==0x22 || *(buffOfFrame+3)==0x88))
{
//循环确保播音停止
nCircleTimes = 0;
do
{
if( nCircleTimes != 0)
SYN6658SpiDelayMs(200);
for(i=0;i<5;i++) //发送Stop命令(含结束字节)
nReceiveData = SYN6658SpiSendOneByte(*(nBuffStopAddEnd+i));
nCircleTimes++;
if( nCircleTimes >= 4 ) // 1次成功率在99.5%以上,多次确保成功
break; //退出
}while(nReceiveData != 0x41) ;
SYN6658SpiDelayMs(200);
}
//循环确保下位机成功接收命令帧
nCircleTimes = 0;
do
{
if( nCircleTimes != 0)
SYN6658SpiDelayMs(200);
//发送本命令帧
for(i=0;i<nFrameLen;i++)
{
nReceiveData = SYN6658SpiSendOneByte(*(buffOfFrame+i));
if( nReceiveData == 0x41 || nReceiveData == 0x45) //
break;
}
//发送帧结束字节0xFF,并得到下位机返回的值
if (nReceiveData != 0x41 && nReceiveData != 0x45 )
nReceiveData = SYN6658SpiSendOneByte(0xFF);
nCircleTimes++;
if( nCircleTimes >= 4 ) // 1次成功率在99.5%以上,多次确保成功
return 0x45; //失败:通讯异常或准备命令帧有错
}while(nReceiveData != 0x41) ;
return 0x41; //接收成功
}
¶ 2.2 用户需配置和实现
//注意:以下数据类型和3个子函数,客户根据自己的硬件情况自己配置和实现
#define T_UInt8 unsigned char //无符号单字节
#define T_UInt16 unsigned int //无符号2字节整型
#define T_VOID void
/******************************************************************
* 功能 : 延时参数中给定的毫秒数
* 参数1 : 需延时的毫秒数
******************************************************************/
T_VOID SYN6658SpiDelayMs(T_UInt16 nMsCount)
{
//用户实现
}
/******************************************************************
* 功能 : 检测状态R/B引脚的电平值确定芯片忙闲状态
* 返回值: 1:R/B引脚为高电平,表示SYN6658芯片为Busy
* 0:R/B引脚为低电平,表示SYN6658芯片为Ready
******************************************************************/
T_UInt8 SYN6658SpiCheckBusy(T_VOID)
{
//用户实现
}
/******************************************************************
* 功能 : 传输1个字节
* 参数1 : 发送的本字节值
* 返回值: 接收的字节值
******************************************************************/
T_UInt8 SYN6658SpiSendOneByte( T_UInt8 data1)
{
//用户实现
}
¶ 2.3 封装函数调用举例
main()
{
INT8U nReturnByte;
//命令帧:合成“欢迎观看语音合成系统的演示”
T_UInt8 buffSyn[31] = {0xFD,0x00,0x1C,0x01,0x01,0xBB,0xB6,0xD3,0xAD,0xB9,0xDB,0xBF,
0xB4,0xD3,0xEF,0xD2,0xF4,0xBA,0xCF,0xB3,0xC9,0xCF,0xB5,0xCD,
0xB3,0xB5,0xC4,0xD1,0xDD,0xCA,0xBE};
T_UInt8 buffStop[4] = {0xFD,0x00,0x01,0x02}; //命令帧:停止
T_UInt8 buffPause[4] = {0xFD,0x00,0x01,0x03}; //命令帧:暂停
T_UInt8 buffResume[4] = {0xFD,0x00,0x01,0x04}; //命令帧:恢复
T_UInt8 buffStandby[4] = {0xFD,0x00,0x01,0x22}; //命令帧:Standby
T_UInt8 buffWake[4] = {0xFD,0x00,0x01,0xFF}; //命令帧:唤醒
......
//合成“欢迎观看语音合成系统的演示”,并等待播音完毕(即R/B引脚为低电平)
nReturnByte = SYN6658SpiSendFrame(buffSyn, 31);
SYN6658SpiDelayMs(10);
while(true)
{
if( SYN6658SpiCheckBusy() == 0 )
break;
}
//合成“欢迎观看语音合成系统的演示”,并在播音过程中,执行“暂停”“恢复”“停止”命令
nReturnByte = SYN6658SpiSendFrame(buffSyn, 31);
SYN6658SpiDelayMs(1500);
nReturnByte = SYN6658SpiSendFrame(buffPause, 4);
SYN6658SpiDelayMs(1500);
nReturnByte = SYN6658SpiSendFrame(buffResume, 4);
SYN6658SpiDelayMs(1500);
nReturnByte = SYN6658SpiSendFrame(buffStop, 4);
SYN6658SpiDelayMs(1500);
//合成“欢迎观看语音合成系统的演示”,并在播音过程中,执行“Standy”命令;然后再“唤醒”;然后再合成
nReturnByte = SYN6658SpiSendFrame(buffSyn, 31);
SYN6658SpiDelayMs(1500);
nReturnByte = SYN6658SpiSendFrame(buffStandby, 4);
SYN6658SpiDelayMs(1500);
nReturnByte = SYN6658SpiSendFrame(buffWake, 4);
SYN6658SpiDelayMs(1500);
nReturnByte = SYN6658SpiSendFrame(buffSyn, 4);
SYN6658SpiDelayMs(1500);
......
}